
 产品:16
产品:16
 联系我们
联系我们

发那科FANUC机器人:在现场系统环境中实现Line Tracking功能
在物流搬运、喷涂等应用中,工件通常是通过传送带来传输的,传输过程中,考虑系统的节拍问题,传送带往往进行持续的运动,不会在机器人对工件搬运或者喷涂过程中停止运动。那么,发那科FANUC机器人怎样在工件运动过程中**地对工件进行搬运或者完成高质量的喷涂呢?机器人的Line Tracking功能,使机器人在工件持续运动过程中仍然能够完成高质量的工作。

在现场系统环境中实现Line Tracking功能,需要在传送带上安装传感器和编码器来检测工件的存在和位置,而在Roboguide仿真环境中则不需要添加硬件;而无论是现场还是仿真环境,都需要在机器人控制柜中安装Line Tracking软件。
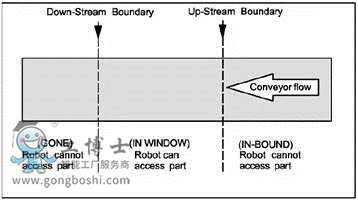
使用Line Tracking功能时,需要在传送带上面设置一个发那科FANUC机器人的工作区(如下图),工件在工作区内机器人是可以抓取工件或者对工件喷涂的,工件还没有进入工作区时,机器人停留在跟踪程序的**个点位,一旦工件进入工作区域,发那科机器人实施抓取或者喷涂工作。
监测工件所在区域是通过在传送带上安装编码器和传感器来实现的,首先,系统是通过在传送带上安装传感器来感测工件已经进入了IN-BOUND区域,当工件处于工作区的边界位置Up-stream Boundary时,是通过编码器来识别的,这时系统启动超边界跳转功能,设置合理的机器人抓取等待时间,机器人会根据工件所在区域的位置来判断是否有足够的时间实施抓取,如果没有足够的时间则将所有的动作点位全部忽略,然后重新设置机器人抓取等待时间,直到满足要求为止。
使用Line Tracking功能时,需要在传送带上面设置一个发那科FANUC机器人的工作区(如下图),工件在工作区内机器人是可以抓取工件或者对工件喷涂的,工件还没有进入工作区时,机器人停留在跟踪程序的**个点位,一旦工件进入工作区域,发那科机器人实施抓取或者喷涂工作。
监测工件所在区域是通过在传送带上安装编码器和传感器来实现的,首先,系统是通过在传送带上安装传感器来感测工件已经进入了IN-BOUND区域,当工件处于工作区的边界位置Up-stream Boundary时,是通过编码器来识别的,这时系统启动超边界跳转功能,设置合理的机器人抓取等待时间,机器人会根据工件所在区域的位置来判断是否有足够的时间实施抓取,如果没有足够的时间则将所有的动作点位全部忽略,然后重新设置机器人抓取等待时间,直到满足要求为止。
Line Tracking功能往往要求工件做直线进给运动,并且摆放规则。而当工件在传送带上摆放不规则时,通常使用Vision Tracking功能来识别工件。 Vision Tracking功能是在Line Tracking功能的基础上增加了视觉系统,通过拍照识别工件的摆放方向,从而对工件准确抓取。Vision Tracking功能相对于Line Tracking功能的优点有:系统设置简单、程序更加简洁、触发精度高、机器人节拍可以小于线速度节拍以及多台机器人协调动作。
Line Tracking功能或者Vision Tracking功能使机器人自动补偿工件随导轨的流动,即把**运动的工件当作相对静止的物体。实现了在不停止装配流水线的前提下,机器人对流水线上工件的操作。
Line Tracking功能或者Vision Tracking功能使机器人自动补偿工件随导轨的流动,即把**运动的工件当作相对静止的物体。实现了在不停止装配流水线的前提下,机器人对流水线上工件的操作。
更多信息请咨询:发那科FANUC机器人