
 产品:16
产品:16
 联系我们
联系我们

发那科机器人:参考位置设定方法
机器人参考位置是在运行程序中或手动运行过程中频繁使用的固定位置(预先设定的位置)。参考位置通常是离开工装夹具等外围设备的可动区域范围内的安全位置。
机器人位于参考位置时,会立即输出预先设定的数字信号,实现与总控系统或其他设备的信号交互。发那科机器人根据这种工况,在机器人系统中内置了参考位置设定功能,以方便用户快速有效地实现机器人的运行控制需求。该功能可以通过将参考位置设定置于启用/禁用,来实现约定信号的输出有效或无效。机器人*多支持设定10个参考位置。
参考位置设定方法
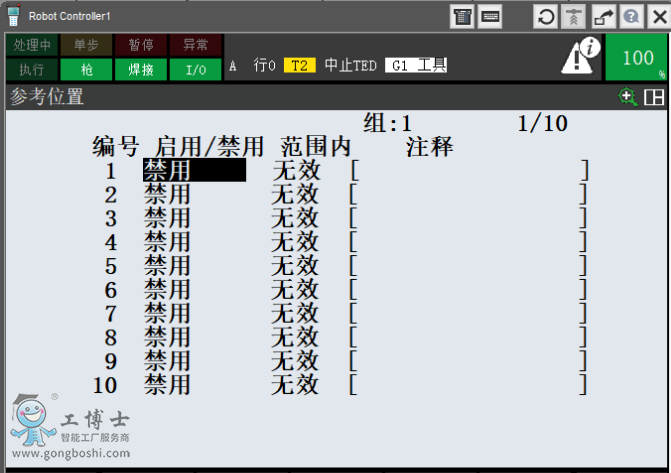
1.机器人示教器上按“MENU (菜单)”键,在弹出的“MENU1” 菜单画面中,依次选择“6 设置”→“设置 2”→“4 参考位置”。

2.在弹出的参考位置一览画面中,选择要设定的参考位置编号,本例中选择编号1。
3.点击下方的“详细”,在弹出的设定参考位置详细画面中,可以设定参考位置相关参数,主要需要设定的有注释、信号定义、机器人各个轴的旋转角度以及各个轴的允许误差范围。
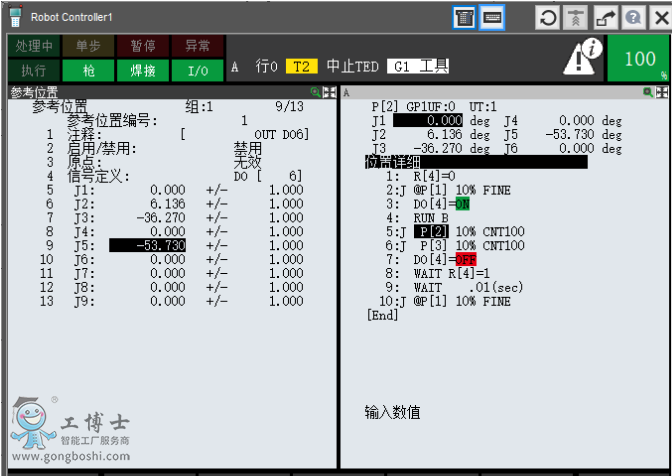
注释设置:参考位置注释设置与其他注释设置方法一样,直接输入需要设置的注释信息就可以了,如本例中设置的OUT DO6。
信号定义:在“信号定义”参数栏中可以设定机器人位于参考位置时的数字输出信号,发那科机器人支持设定两种信号类型,分别是数字量输出类型(DO[])与机器人输出类型(RO[]),本例定义的输出信号为DO[6]。定义输出信号时,要避免与其它参考位置发生重复。如果在两个以上参考位置中定义了同一信号,则有可能会发生机器人处在参考位置时,但输出信号状态无变化等不可预料的错误。
机器人参考位置:机器人参考位置有两种设定方法:一、位置示教,首先将机器人手动运行到参考位置处,然后将光标移动到J1~J6的设定栏,*后在示教器的操作面板中按住SHIFT键,同时再点击“记录”依次对当前参考位置进行示教;二、直接输入参考位置数值,这种情况下,可以将光标移动到J1~J6的设定栏,然后按“ENTER”键,输入机器人轴的旋转角度值之后,再次按下“ENTER”键对输入的角度值进行确认。本例中采用第二种参考位置设定方法,将程序A中的P[2]示教点位置作为机器人参考位置,直接输入机器人在参考位置各个轴的旋转角度值。当然,如果工作站中有外部轴,还可以在J7~J9栏中分别输入对应的外部轴参考位置,此处要注意伺服电机旋转角度与外部设备运动量之间的减速比。
允许误差范围:允许误差范围栏中可以设置机器人在参考位置各个轴的旋转误差,设定值要大于等于0.1。
4.完成设定后按下“PREV(返回)”键,返回参考位置一览画面。然后,选择编号为1的参考位置,点击“启用”。此时,设定的机器人参考位置功能已经生效。
更多信息请咨询:发那科FANUC机器人