
 产品:16
产品:16
 联系我们
联系我们


具体操作方法如下:
二、使用工具清单
1.内六角扳手一套

2.张力计一个(型号:A97L-0218-0700)
三、检查部位和对应参数
3.1 LR Mate 200IC检查部位和对应参数


J3轴皮带张力检查及调整

J5轴皮带张力检查及调整



J6轴皮带张力检查及调整
3.2 LR MATE 200ID检查部位和对应参数


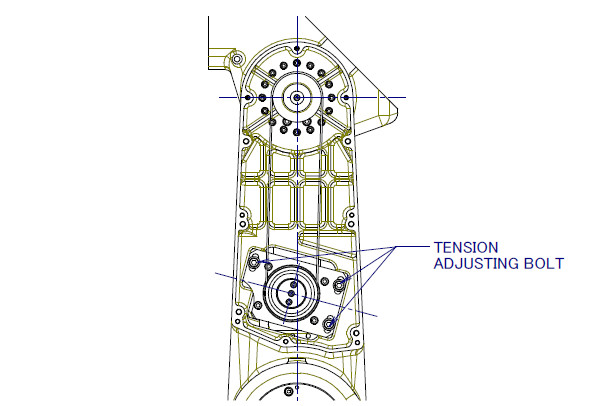
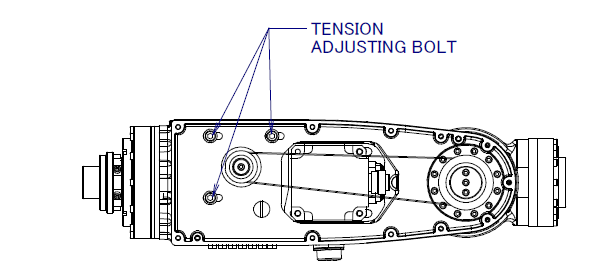
J3轴皮带张力检查及调整


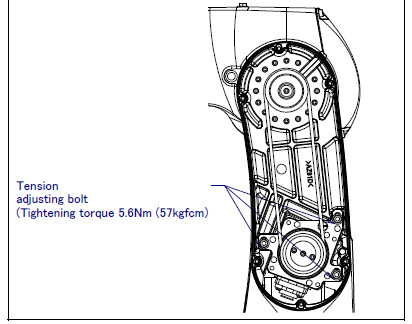
J5轴皮带张力检查及调整

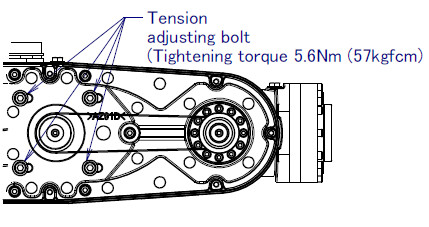

J6轴皮带张力检查及调整
四、具体检查步骤
下面以LR Mate 200ID机器人的J5轴皮带为例。
1.打开J5轴盖板。
 2. 将张力计开机。其中有两档开关,ON(高)开关适用于噪音小,振动小的场合;ON(低)开关适用于与噪音大,振动大的场合。
2. 将张力计开机。其中有两档开关,ON(高)开关适用于噪音小,振动小的场合;ON(低)开关适用于与噪音大,振动大的场合。


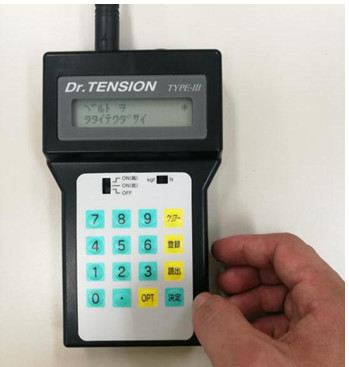
3. 开机后,按决定键,进到如图所示的画面,输入皮带的单位质量,这里输入0.0208后按决定键,其他轴和其他机型的参数详将第三章。


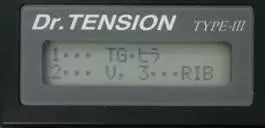
4. 皮带的种类

LR MATE系列的所有机型都是选择1(TG类型)。
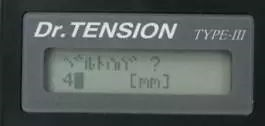
 5.皮带的宽度
5.皮带的宽度
这里选择4mm,按决定键。其他轴和其他机型的参数详将第三章。

6.皮带的跨度
这里选择187mm,按决定键。其他轴和其他机型的参数详将第三章。
7.测量画面

出现这个画面,说明参数已经设置好,可以进行下面的皮带张力测量。
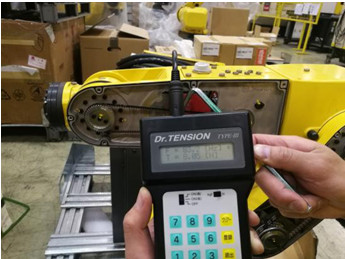
8.测量张力
用内六角在皮带中部轻轻敲击,将张力计的振动接收器靠近皮带,直到出现读数,检查读数是否在允许范围内。如果不在范围内,就需要按照第三章的方法(调整马达固定螺丝)调整皮带的松紧,然后再测量皮带张力,直到皮带张力再允许范围内。
以上是皮带检查的全部过程,完成后对现场做好5S工作。
五、张力计测定条件的保存和读出
每一台机器人有三根皮带要测量,需要三组条件。一个一个输入会比较繁琐,这里使用张力计的测定条件的保存功能(*多10组条件,NO:1-10)。
1.按照第四章的方法输入参数,直到出现如图所示的测量画面。
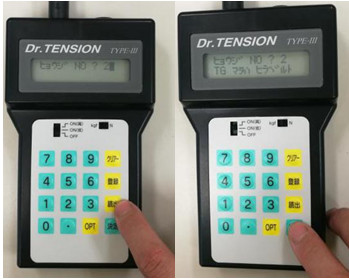
2.保存条件功能
如左图所示,按右上角的按键,再按登录键,出现右图的画面,按数字按键2,再按决定键,将上述参数存为条件2。
 3.读出功能
3.读出功能
将张力计关机后再重启,按读出键,按入2号条件,就可以看到2号条件的具体设置。
4. 测量
开机后,直接输入条件号2后按决定键,就可以用之前保存好的条件2去测量皮带的张力。


六、作业中安全用品一览
安全帽、安全挂锁、手套、安全鞋
更多信息请咨询:发那科FANUC机器人